Last update 2006/9/23
![]() 僩僢僾儁乕僕乽梱偐側傞傾儞僨僗傊偺椃乿傊栠傞
僩僢僾儁乕僕乽梱偐側傞傾儞僨僗傊偺椃乿傊栠傞
慏偲僐儞僺儏乕僞
挻帺摦壔慏乽惎岝娵乿張彈峲奀偺婰榐
| 壓婰乮暥復晹暘乯偼丄侾俋俈侽擭偵廇峲偟偨挻帺摦壔慏乽惎岝娵乿偺塮夋僫儗乕僔儑儞偱偡丅偙傟偵幨恀傪揧偊偰徯夘偟傑偡丅側偍丄偙偺儂乕儉儁乕僕嶌幰偼丄摉帪丄杮慏偺僐儞僺儏乕僞僔僗僥儉丄摿偵峲朄僔僗僥儉傪扴摉偟偰偍傝丄張彈峲奀偍傛傃戞係師峲奀偵忔慏丄擔杮偲儁儖僔儍榩娫傪俀夞墲暅偟傑偟偨丅惎岝娵偼丄傢偑崙偱弶傔偰僐儞僺儏乕僞傪杮奿揑偵搵嵹偟偨慏偱丄姱柉嫤椡偟偰偦偺奐敪偵庢傝慻傫偩惉壥偱偡丅 |

| 塮夋奣梫乮夛幮柤摍偼摉帪偺柤徧乯 戣柤丂丂慏偲僐儞僺儏乕僞丂惎岝娵張彈峲奀偺婰榐 帪娫丂丂俀俇暘娫 婇夋丂丂愇愳搰攄杹廳岺嬈姅幃夛幮 丂丂丂丂丂搶嫗幣塝揹婥姅幃夛幮 惂嶌丂丂娾攇塮夋惢嶌強 嫤椡丂丂塣桝徣 丂丂丂丂丂嶰岝婦慏姅幃夛幮 丂丂丂丂丂乮嵿乯擔杮慏敃怳嫽夛 丂丂丂丂丂乮幮乯擔杮憿慏尋媶嫤夛 丂丂丂丂丂乮嵿乯擔杮敃梡婡婍奐敪嫤夛 惂嶌婜娫丂丂侾俋俇俋擭俋寧乣侾俋俈侾擭俀寧 |
 |
僫儗乕僔儑儞 徍榓係俆擭(1970擭)俋寧俀俀擔丄堦惽偺僞儞僇乕偑丄嶻傒偺恊偱偁傞媄弍幰払偵尒憲傜傟丄儁儖僔儍榩偺儔僗僞僰儔傊岦偐偭偰崱椃棫偭偰峴偒傑偡丅 丂 |
  |
| 惎岝娵丄侾俁枩俉愮僩儞丄俬俫俬憡惗岺応偱姰惉丄 慡挿俀俈係倣丄暆係俁丏俆倣丄堦尒偟偨偲偙傠暯杴側僞儞僇乕偱偡偑丄僐儞僺儏乕僞偵傛偭偰僐儞僩儘乕儖偝傟傞慡偔怴偟偄僞儞僇乕偱偡丅 丂丂丂乮栺俁俵俛偺僼傽僀儖丄嵞惗帪娫丗栺係俀昩乯 丂(Internet Explorer 偱尒傜傟側偄応崌丄忋婰傪塃僋儕僢僋 丂仺乽怴偟偄僂僀儞僪僂偱奐偔乿偱僼傽僀儖傪幚峴偟偰偔偩偝偄乯 |
|
| 惎岝娵偺僐儞僺儏乕僞丒僐儞僩儘乕儖偺摿挿偼丄侾戜偺僐儞僺儏乕僞偱懡偔偺巇帠傪廤拞揑偵僐儞僩儘乕儖偡傞偲偙傠偵偁傝傑偡丅 偙傟偑僐儞僺儏乕僞丗TOSBAC-3000S偱偡丅 忔慻堳偼娐嫬偺傛偄僐儞僩儘乕儖儖乕儉偱悢屄偺儃僞儞傪憖嶌偡傞偩偗偱傛偔丄僐儞僺儏乕僞偵偮偄偰偺摿暿偺抦幆傗宱尡偑側偔偰傕憖嶌偱偒傞傛偆偵側偭偰偄傑偡丅 |
 |
| 忔慻堳偑僐儞僺儏乕僞偵柦椷偡傞偨傔偺僐儞僺儏乕僞僐儅儞僪僐儞僜乕儖 僐儞僺儏乕僞偺僾儘僌儔儉偼丄峲朄娭學丄壸栶娭學丄僄儞僕儞娭學丄堛椕娭學偲係偮偺暘栰偵傢偨偭偰侾俁偁傝傑偡丅 昞帵摂偑椢怓偺傕偺偑丄尰嵼摥偄偰偄傞僾儘僌儔儉偱丄愒偄傕偺偼尰嵼巊傢傟偰偄側偄僾儘僌儔儉偱偡丅 |
 |
| 僐儞僺儏乕僞偼搶幣惵攡岺応偱偮偔傜傟傑偟偨丅 慏偺忋偼棨偲偼堘偭偰愨偊偢梙傟摦偒丄怳摦偟偰偄傑偡丅偦偺忋丄崅偄幖搙偲偄偆埆忦審傕廳側傝傑偡丅偙偆偟偨忦審偺傕偲偱埨掕偟偰摥偔傛偆愝寁丒帋尡偝傟崅偄怣棅惈傪帩偭偰偄傑偡丅 惎岝娵偺僐儞僺儏乕僞偼侾戜偱條乆側巇帠傪摨帪偵張棟偟傑偡丅 摨帪偵張棟偡傞偲偄偭偰傕丄幚偼偪傖傫偲巇帠偺弴斣傪敾抐偟偰堦偮堦偮曅晅偗偰偄傞偺偱偡丅偱傕偦傟偑壗枩暘偺侾昩偲偄偆懍偝偱峴傢傟傞偺偱丄幚嵺偵偼摨帪偵張棟偟偰偄傞偺偲摨偠偙偲偵側傝傑偡丅偙傟傪儕傾儖僞僀儉丒僆儞儔僀儞曽幃偲偄偄傑偡丅 |
 |
| 埫偄奀傪僐儞僺儏乕僞偵摫偐傟偰埨慡偵峲奀偡傞惎岝娵 |  |
| 慏偺尰嵼埵抲傗恓楬偼僐儞僺儏乕僞偑惓偟偔寁嶼偟偰偔傟傑偡丅 峲朄寁嶼昞帵憰抲丅偙偙偵偼丄侾暘偛偲偵偙偺慏偺悇掕埵抲偑帵偝傟傑偡丅 埵抲偺悇掕偼丄慏偺僗僺乕僪傗恓楬傪應掕偟丄偝傜偵昁梫側僨乕僞傪壛偊丄愱梡偺寁嶼婍俢俼俹俠偲僐儞僺儏乕僞偱寁嶼偟傑偡丅 慏偺僗僺乕僪偺應掕偼丄晽傗挭棳偺塭嬁傪梊憐埲忋偵庴偗傞偺偱丄摉慠丄悇掕埵抲偵傕岆嵎偑惗偠傑偡丅 |
 |
| 慏偺悇掕埵抲偲幚嵺偺埵抲偼帪娫偑宱偮偵偮傟偰岆嵎偑戝偒偔側偭偰偄偒傑偡丅偦偙偱丄恖岺塹惎俶俶俽俽偺揹攇傪庴怣偟偰尰嵼埵抲傪應掕偟丄悇掕埵抲偺岆嵎傪廋惓偟傑偡丅摨帪偵丄挭棳偺塭嬁偼偙傟偐傜偺埵抲傪悇掕偡傞僨乕僞偵側傝傑偡丅 |  |
| 偙偺傾儞僥僫偱恖岺塹惎俶俶俽俽偺揹攇傪庴怣偟傑偡丅 恖岺塹惎俶俶俽俽偼丄抧媴忋侾侾侽侽倠倣偺崅搙偱嬌婳摴傪夞傝丄峲奀偡傞慏偑埵抲傪應掕偡傞偨傔偺愱梡揹攇傪敪怣偟偰偄傑偡丅偱偡偐傜丄抧媴忋偺偁傜備傞抧揰偱丄拫栭偺暿側偔丄偟偐傕揤岓忬懺偵娭學側偔偳傟偐偺揹攇傪庴怣偱偒傑偡丅 |
 |
| 俶俶俽俽庴怣婡偑揹攇傪庴怣偟偰夝撉偟丄偦傟傪傕偲偵僐儞僺儏乕僞偑慏偺尰嵼埵抲傪寁嶼偟傑偡丅 偮傑傝丄恖岺塹惎偑俙揰傪捠夁偟偰偐傜俛揰傑偱偺俀暘娫偱僪僢僾儔廃攇悢偲丄婳摴僨乕僞傪傕偲偵慏偲俙丆俛傑偱偺嫍棧嵎偑堦掕偺婳愓傪寁嶼偟丄摨條偵偟偰俛丆俠偐傜偺傕偆堦偮偺婳愓傪寁嶼偟傑偡丅偙偺擇偮偺婳愓偺岎傢傞堦揰偑慏偺埵抲側偺偱偡丅 |
 |
| 恖岺塹惎俶俶俽俽傪棙梡偡傟偽丄偳偙偵偄偰傕惓妋偵慏偺尰嵼埵抲傪應掕偡傞偙偲偑偱偒傑偡丅 偙傟偵傛偭偰惎岝娵偼栚揑抧傑偱偺嫍棧丄帪娫側偳峲奀偵昁梫側偙偲偑偡傋偰帺摦揑偵妋擣偱偒丄嵟傕宱嵪揑側峲奀偑偱偒傞偺偱偡丅 |
 |
| 僄儞僕儞儖乕儉丄俀俉侽侽侽攏椡偺僨傿乕僛儖僄儞僕儞 偙偺僄儞僕儞偺忬懺偼忢偵僐儞僺儏乕僞偑娔帇偟偰偄傑偡丅 僄儞僕儞娭學偺僐儞僺儏乕僞偺巇帠偼丄僨乕僞丒儘僊儞僌丄僩儔僽儖丒僐儞僩儘乕儖丄僩儖僋丒僐儞僩儘乕儖偱偡丅 儘僊儞僌丒僞僀僾儔僀僞偑崱丄婡娭晹偺壏搙丄埑椡側偳傪婰榐偟偰偄傑偡丅壏搙傗埑椡側偳偺僨乕僞偼丄抦傝偨偄斣崋傪墴偣偽丄偄偮偱傕屇傃弌偡偙偲偑偱偒傑偡丅 僐儞僺儏乕僞偼僄儞僕儞傗婡娭晹偺偁偪偙偪偐傜廤傑傞偙傟傜僨乕僞傪張棟偟丄堎忢偑側偄偐偳偆偐傪娔帇偟側偑傜堦掕帪娫偛偲偵婰榐偟偰偄偒傑偡丅 偨偲偊偽僄儞僕儞偺椻媝億儞僾偵堎忢偑敪惗偟偨応崌 捈偪偵梊旛億儞僾傊偺愗傝懼偊偑帺摦揑偵峴傢傟丒丒 僆乕僩僞僀僾儔僀僞偑屘忈屄強偲帺摦愗姺偊傪偟偨偲偄偆寢壥傪懪偪弌偟偰偒傑偡丅 僄儞僕僯傾偼偦傟傪妋擣偡傟偽傛偄傢偗偱丄僄儞僕儞偺僗僺乕僪丒僟僂儞丄億儞僾偺愗姺偊摍偼僐儞僺儏乕僞偵傛偭偰帺摦揑偵峴傢傟傑偡丅 峲奀擔悢偑憹偊偰偔傞偲丄慏懱偑墭傟偰偔傞偺偱丄杸嶤掞峈偑戝偒偔側傝傑偡丅傕偟丄僄儞僕儞傪堦掕偺夞揮悢偱塣揮偡傞偲僩儖僋偑忋徃偟丄僄儞僕儞偵柍棟偑偐偐傝丄儔僀僫乕偑從偗偨傝丄僺僗僩儞儕儞僌偑愜傟偨傝偡傞帠屘偺尨場偵側傝傑偡丅 晛捠丄僄儞僕僯傾偼僩儖僋偑忋徃偟側偄傛偆偵丄偲偒偳偒夞揮悢傪棊偲偟偰塣揮偟傑偡丅偦偺偲偒埨慡塣揮偺尷奅傕曄傢傝傑偡丅偲偙傠偑惎岝娵偺僐儞僺儏乕僞偼丄帺摦揑偵楢懕偟偰僄儞僕儞偺夞揮悢傪僐儞僩儘乕儖偟埨慡塣揮傪峴偆偺偱偡丅 |
   |
俋寧俀俋擔丅擔杮傪弌偰俉擔栚 僔儞僈億乕儖傪塃庤偵尒傞偲丄偄傛偄傛儅儔僢僇奀嫭偵偝偟偐偐傝傑偡丅儅儔僢僇奀嫭偼悽奅拞偱嵟傕慏偺崿傒崌偆奀堟偺堦偮偱偡丅慏偑戝宆壔偟偰丄慁夞敿宎傗掆巭嫍棧偑戝偒偔側偭偨偺偱丄傂偲偮恓楬傪岆傟偽徴撍帠屘偵傕側傝偐偹傑偣傫丅 |
  |
| 偟偐偟丄惎岝娵偺僐儞僺儏乕僞偼徴撍梊杊偺僾儘僌儔儉傪帩偭偰偄傞偺偱丄慏偺崿傒崌偆奀堟偱偦偺埿椡傪敪婗偟傑偡丅 恓楬偵擖偭偰偔傞慏傪偡偽傗偔敪尒偡傞偺偼儗乕僟偱偡丅 惎岝娵偱偼丄擇偮偺攇挿傪慻傒崌傢偣偨摿暿側儗乕僟傪巊偭偰偄傑偡丅 |
 |
| 儗乕僟偑偲傜偊偨廃埻偺忬嫷偼丄嶨壒揹攇偲奀柺斀幩偑彍偐傟丄偒傟偄側怣崋偵側偭偰丄慏偺摦偒傪帺摦揑偵捛愓偡傞憰抲偵憲傝崬傑傟傑偡丅僐儞僺儏乕僞偼偦偺僨乕僞傪傕偲偵堦掕帪娫偛偲偵懠偺慏偑偳偺埵抲偵恑傓偐傪寁嶼偟丄徴撍梊杊僐儞僜乕儖偺僽儔僂儞娗偵傕偦偺梊憐埵抲傪昞帵偟傑偡丅 |  |
| 偦偟偰僐儞僺儏乕僞偼徴撍傪旔偗傞埨慡側恓楬傪巜帵偟傑偡丅 偙偆偟偰惎岝娵偼嵟傕埨慡側恓楬傪偲傞偙偲偑偱偒傞偺偱偡丅 偝傜偵丄僐儞僺儏乕僞偼丄傑傢傝偺慏傪侾侽惽傑偱帺摦揑偵捛愓偟丄婋尟偑桳傞偐柍偄偐傪敾抐偱偒傑偡丅 |
 |
| 偱偡偐傜丄慏偑懡偄応崌偼娔帇偺昁梫偑偁傞慏偩偗傪儔僀僩儁儞偱儅乕僋偟傑偡丅傑偨丄侾侽惽偺拞偐傜堦偮偺慏傪巜掕偡傞偲丄僐儞僺儏乕僞偼偦偺慏偺恓楬傗懍搙傪寁嶼偟丄偝傜偵偳偺僐乕僗傪偲偭偨傜徴撍偑旔偗傜傟傞偐傪偼偠偒弌偟傑偡丅 |  |
| 偦傠偦傠栚揑抧傕嬤偔側傝傑偟偨丅 摓拝梊掕傪惓妋偵棫偰傞偨傔丄峲朄寁嶼憰抲偑巊傢傟傑偡丅 惎岝娵偺尰嵼埵抲偲栚揑抧偺儔僗僞僰儔偺埵抲傪擖傟傑偡丅 栚揑抧傑偱侾俋俇侾奀棦 偁偲係擔偲俀侽帪娫係俁暘偱偡丅 擔杮傪椃棫偭偰俉擔栚偵僔儞僈億乕儖丄偦偟偰儅儔僢僇奀嫭傪捠夁偟丄侾俉擔栚偵栚揑抧儔僗僞僰儔偵拝偔偙偲偵側傝傑偡丅 |
 |
| 擖峘偑嬤偯偔偲丄僆僼傿僒偼壸栶偺偙偲偱摢偑堦攖偵側傝傑偡丅 偙偺偲偒栶棫偮偺偑僆僼傿僒乕僘丒僐儞僜乕儖傪巊偭偰偡傞忬懺寁嶼偲嵟揔愊傒晅偗寁嶼偱偡丅 偳偆偄偆尨桘傪偳傟偩偗丄偳偺僞儞僋偵愊傓偐偵傛偭偰曄傢偭偰偔傞慏偺捑傒曽傗慏偵偐偐傞椡側偳傪寁嶼偡傞偺偑忬懺寁嶼偱偡丅 堦曽丄峘偵傛偭偰堘偭偰偔傞媔悈偺惂尷傗丄尨桘偺斾廳傪峫椂偟偰偄偐偵柍棟側偔壸傪愊傓偐傪媮傔傞偺偑嵟揔愊傒晅偗寁嶼偱偡丅 僐儞僺儏乕僞偵傛傞偙偆偟偨寁嶼偱丄崱傑偱偺僇儞傪棅傝偺寁嶼偲偼斾妑偵側傜側偄傎偳慏偺埨慡惈偼憹偟丄懡偔偺尨桘傪愊傓偙偲偑偱偒傞傛偆偵側傝傑偟偨丅 |
 |
| 弌峲偟偰偐傜侾俉擔栚丄惎岝娵偼儔僗僞僰儔偵擖峘 梻侾侽寧侾侽擔丄僔乕僶乕僗偵愙娸 尨桘傪愊傒崬傓偨傔偺僠僋僒儞僕儑僀儞僩偑寢崌偝傟傑偡丅 |
 |
僐儞僺儏乕僞偵傛傞儘乕僨傿儞僌偑巒傑傝傑偟偨丅 崱夞偼俀庬椶偺尨桘偑愊傒崬傑傟傑偡丅 僞儞僋偺塼柺偑忋徃偟丄慏偺媔悈偑怺偔側偭偰備偒傑偡丅 僞儞僋偑堦攖偵側偭偰偔傞偲愒儔儞僾偑偮偒傑偡丅 |
 丂 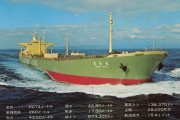 |
尨桘傪枮嵹偟偨惎岝娵偼丄儔僗僞僰儔傪屻偵擔杮偵岦偐偄傑偡丅 |
|
墲暅偺峲奀傪捠偠偰僐儞僺儏乕僞僔僗僥儉偼戝偄偵偦偺擻椡傪敪婗偟傑偟偨丅偦偺懡嵤側擻椡偺拞偱丄崱夞偺峲奀偱偁傑傝棙梡偝傟側偐偭偨偺偑丄僐儞僺儏乕僞偵傛傞堛椕恌抐偱偡丅偲偄偆偺偼俁俋擔偺峲奀拞慡堳尦婥偩偭偨偐傜偱偡丅 |
  |
| 慏堛偝傫偼戝偄偵僸儅傪帩偰梋偟傑偟偨丅帪娫偮傇偟偵堛椕恌抐傪傗偭偰傒偰偼僐儞僺儏乕僞偺榬傪偨傔偟偰傒傑偟偨丅愭惗偑憐憸偟偨昦忬傪僐儞僺儏乕僞偵懪偪崬傓偲丄恌抐寢壥偲栻偺巜帵傗張抲傪懪偪弌偟傑偡丅偙偺堛椕恌抐僾儘僌儔儉偼搶戝堛妛晹偺嫤椡傪摼偰丄慏堳梡偵偼偠傔偰奐敪偝傟偨傕偺偱偡丅 |
 |
| 僼傽僋僔儈儕偱憲傜傟偰偔傞僯儏乕僗 擔杮傑偱偁偲傢偢偐偱偡丅 侾侽寧俁侽擔丄弌峲埲棃俁俋擔丄惎岝娵偼搶嫗榩偺嫗梩僔乕僶乕僗偵摓拝 |
 |
| 壸栶偺偨傔偺僨乕僞偑僐儞僺儏乕僞偵僀儞僾僢僩偝傟傑偡丅 傾儞儘乕僨傿儞僌偺庤弴偼儘乕僨傿儞僌埲忋偵暋嶨偱偡丅 僐儞僺儏乕僞偺巜椷偱丄僞儞僋偺僶儖僽偑奐偒丄億儞僾偑夞揮偟丄傾儞儘乕僨傿儞僌偑巒傑傝傑偡丅 僐儞僺儏乕僞偼忢偵僞儞僋偺塼柺丄慏偺媔悈丄億儞僾偺夞揮悢丄埑椡側偳偺娔帇傪懕偗丄堦掕帪娫偛偲偵寁嶼偟丄帺摦揑偵婰榐偟傑偡丅傑偨丄慏偺孹偒傗媔悈偑堎忬偵側傞偲丄奺僞儞僋偺僶儖僽傪憖嶌偟丄僶儔儞僗傪庢傝栠偟傑偡丅 塼柺偑壓偑傞偲丄億儞僾偺媧偄崬傒偑埆偔側傞偺偱丄塼柺偵墳偠偰夞揮悢傪忢偵僐儞僩儘乕儖偟傑偡丅 尨桘偲堦弿偵嬻婥偺媧偄崬傒偑巒傑傞偲丄嬻婥偼億儞僾偵擖傞慜偵僙儖僼丒僗僩儕僢僾憰抲偱庢傝彍偐傟丄傾儞儘僨傿儞僌偵巟忈偺側偄傛偆偵丄僶儖僽傗夞揮悢偺僐儞僩儘乕儖偑懕偗傜傟傑偡丅 僞儞僋偑嬻偵側傞偲丄僗僩儕僢僾姰椆憰抲偑僐儞僺儏乕僞偵抦傜偣丄僐儞僺儏乕僞偼偡傋偰偺僶儖僽傪暵傔偰丄億儞僾傪掆巭偡傞巜帵傪弌偟丄傾儞儘乕僨傿儞僌傪廔椆偟傑偡丅 慏偵偼侾俁偺僞儞僋偲俁戜偺億儞僾偑偁傞偺偱丄幚嵺偺傾儞儘乕僨傿儞僌偼傕偭偲暋嶨偱偡丅傑偨慏偼壸栶偑廔傢傞偲偡偖弌峲偡傞偨傔丄僶儔僗僩偺奀悈傪愊傒崬傑側偗傟偽側傝傑偣傫丅偙傟傜偄傠偄傠偺梫慺偺僶儔儞僗傪偲傝側偑傜憗偔埨慡偵壸栶偑偱偒傞傛偆丄僐儞僺儏乕僞偼僐儞僩儘乕儖偟偰偄傞偺偱偡丅 尨桘偲堦弿偵嬻婥偺媧偄崬傒偑巒傑傝傑偟偨丅 僞儞僋偑嬻偵側傝傑偟偨丅 傾儞儘乕僨傿儞僌廔椆 |
   |
| 惎岝娵偺忔慻堳偨偪偼丄張彈峲奀傪捠偠偰丄傑偭偨偔怴偟偄宱尡傪偟傑偟偨丅僐儞僺儏乕僞偲懳榖偡傞偲偄偆偙偲偑偳偆偄偆偙偲側偺偐丄枹棃偺峲奀偑偳傫側傕偺偱偁傞偐傪丄偒偭偲斵傜偼姶偠偲偭偨偙偲偱偟傚偆丅 |  |
| 慏偲僐儞僺儏乕僞 偙傟偼扨偵憿慏偲僄儗僋僩儘僯僋僗偲偄偆俀偮偺媄弍偺寢傃偮偒偱偁傞偩偗偱側偔丄娭楢偡傞偁傜備傞暘栰偺恖乆偑僈僢僠儕庤傪慻傫偱惉偟悑偘偨擔杮憿慏媄弍偺惉壥側偺偱偡丅丂乮廔乯 |
|
| DRPC | Dead Reckoning Position Calculator 悇掕埵抲寁嶼婍 |
懍搙僙儞僒偲恓楬僙儞僒乮僕儍僀儘乯偐傜慏偺埵抲傪侾暘偛偲偵寁嶼偡傞丅帪娫偺宱夁偱丄奀棳偺塭嬁偵傛傝岆嵎偑惗偠偰偔傞偺偱丄NNSS偱廋惓偡傞丅 |
| NNSS | Navy Navigation Satellite System 暷奀孯偺峲峴塹惎僔僗僥儉 |
恖岺塹惎偐傜偺揹攇傪棙梡偟偰慏偺埵抲傪媮傔傞丅侾乣俀帪娫偵侾夞偟偐媮傔傞偙偲偑偱偒側偄偺偱丄偦偺娫偼DRPC偺寢壥傪慏偺埵抲偲偟偰巊梡偡傞丅 偙偺NNSS偼丄尰嵼偺僇乕僫價偵棙梡偝傟偰偄傞GPS傊敪揥偟偨丅 |
| TOSBAC -3000S |
搶幣惢偺僐儞僺儏乕僞 | 棨忋梡偺儈僯僐儞僺儏乕僞傪慏偺娐嫬偵揔崌偡傞傛偆夵椙偟偨丅 杮懱儊儌儕丗俁俀KB丄奜晹婰壇丗侾俇侽KB 僾儘僌儔儉嶌惉偼僞僀僾儔僀僞偲巻僥乕僾傪巊梡丅 CRT僨傿僗僾儗僀偼側偄丅 儅僀僐儞偑惗傑傟傞慜偺僐儞僺儏乕僞偱偁傞丅 |