第7回 10000回転オーバータコメーターの作成!
温度計、HDDアクセスレベルメーターときて、何か足りないものがある。
そう、タコメーター(回転数計)
(※1)
である!
いそいそと回転信号センサ出力付き冷却ファン
(※2)
を購入してきて、早速作成することにする。
アナログメーターは都合上無理
(※3)
なので、デジタル表示で我慢することにする。仕方がない。
回路は前回同様にPIC16を使用したものにして、1秒間の回転パルスを検出し、それを1分間測定
した状態にかけ算して表示
(※4)
することにした。
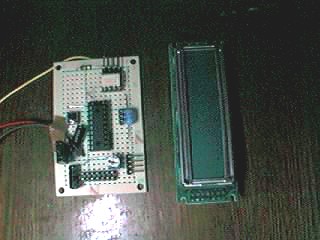
で、完成した基板がこれ。
12Vオンリーでも動くように電源回路を追加してある。
(※5)
ファンの回転信号センサの出力は、オープンコレクタであった
(※6)
。また、検出用センサが2つ取り付けて
あるようで、1回転で2回出力される。
そのため、1秒間計測した数に30をかければ1分間の回転数
(※7)
が算出できるわけである。
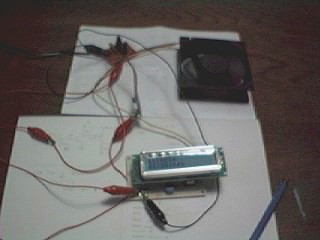
実験中の様子
実際に回転しているファン
(※8)
に接続して、テストしているところである。
ちと暗い
(※9)
が、現在の回転数2970/rpm。
11Vで動かしているからか、あんまり早くない。
もっともファンのサイズは8cmなので、このサイズはきっとこれくらいの回転数
(※10)
なのであろう。
入力端子や液晶の表示スペースに余裕があるので、2個のファンを同時に計ることができるようにしてみた。
上はさっきので下は高速ファン。
さりげなく8000回転オーバーのレッドゾーン(笑)
これを、CPUファンとケースのファンに配線すれば完成である。
さてさて、10000回転越えを見たいところだが、これはまたの機会に。
注
※1
やはりこう、なにやら回転数に応じて上がっていくメーターというものは、欲しいものである。
しかも10000回転オーバーなメーターである。
もちろん、ファンの回転数で10000回転まで回るものはそうそうないだろうと思われるが、そこはそれ、
10000rpmという数字にぐっとくるものがないだろうか?
6800rpmの高速回転ファンで、6800rpm時に電圧をはかってみたところ、11Vくらいであった。
12Vにしてみると、7800~8000回転まで上昇した。Type-Rまでもう少し…か?
もちろん、この基板の回転数の検出が正確であるということが前提ではあるが、ファンのがたつきと音からして、
それくらいは回っていそうである。いくらか電圧を落とさないとやばいかもしれない。
一応波形を観測してみたのだが、やはりそれくらいの間隔でパルスが出力されているのだが…
ちなみに空気抵抗もばかにならず、ファンの排気側を押さえ、排気できないようにすると回転数は低くなる。
吸気側を押さえると回転数は上昇する。
※2
いきなり接続して壊すのも何なので、1つ安いやつを購入してきた。
よくある店頭に転がっているやつである。
もっとも、こういったファンは結構がんがんぶつけられているので、軸受けのベアリングなどに衝撃が伝わり
がたついている心配があるが、まあ細かいことは気にしてはいけない。
なお、最近では流体軸受けタイプの冷却ファンも登場してきているようだ。
これは、回転軸に溝が掘ってあり、この溝に特殊なオイルが回転時の圧力により流れ、ベアリングの代わりを
果たすと言うものである。要は回転軸と軸受けの間を浮かせて摩擦を低減すると言うものである。
ちなみに、なぜ摩擦が発生するのかは、完全に解明できていないらしい。
※3
汎用品を売っているのをみたことがない。単純に知らないだけである。
実際に車用を買ってくるという手もあるのだが、1万回転スケールのタコメーターの値段って
いくらするんでしょうねぇ・・・
※4
厳密に言えば1分間計測した値がrpmといえるのだが、そんなに待っていられない。
刻々と変化するのがよいのである。たまにしか変化しないメーターは、見ていてつまらん(そういう
問題でもないような気がするが)のである。
もちろん、1秒間隔でなく0.5秒間隔などでもかまわないが、あんまりかける数が大きくなると、
小さい桁の変化が限られてくるので、不自然かもしれない。
※5
相変わらずフォトカプラを使っている。
前回の余りがあったからというのも大きいが、なんとなく12Vでぶん回っているファンから、
マイクロプロセッサを切り離したかったというのも大きいかもしれない。
ちなみに電源回路を追加したのは配線の引き回しが実験環境で面倒だったため。
※6
ちなみにこう書いたが、実際にはファンの回転検出用センサタイプには3種類ほどあるらしい。
1つは通常の出力でオープンコレクタではないもの、もう1つは一般的と思われるオープンコレクタタイプ
のもの。これらは回転数を検出できるタイプである。
そして、もう1つは回転停止検出用タイプである。
このタイプのセンサの場合、回転が停止したことを検出するため、停止したときにしか信号が出力されない。
当然のことながら、このセンサだった場合、回転数をはかることはできない。
※7
舶来マシンのファン回転数の更新頻度もだいたい1秒間隔くらいであるので、問題ないと思われる。
ちなみに、回転数表示の先頭に0がついているのがおわかりいただけると思う。
内部的には65535回転まで表示できる。もっとも、そんなに回られてもPICの動作クロックが間に合わないかも
しれないが。
現在は20MHzで動作しているが、PICは4クロックで1命令であるので内部的には5MIPSということになるのかな。
上位チップや互換チップなどでは、内部にPLLによる周波数逓倍回路を内蔵することで4倍し、1クロックに見せ
かけているのもあるようだ。
ちなみに、PLLは元の波形に同期して波形整形などを行う回路であるので、周波数逓倍回路はPLL回路の応用という
ことになる。はず。
※8
高速に回転しているファンはもちろん、低速回転しているファンでも、ファンのサイズが大きいと、持ったときに
非常に強いジャイロ効果を感じる。片手で持ち、ぐりぐり傾けると、ぐいぐい来ていい感じである。
ジャイロ効果とは、かかった力とは逆方向に発生する力で、姿勢を保ち続けようとする効果である。
自転車とか、地球ゴマなどにもこの力は発生している。
金属板(ガラスなんかのもあるようだが)がぶんぶん高速回転しているHDDなんかも、結構ジャイロ効果が感じ
られて良い感触である(ほんとか)。
※9
フラッシュがついていないので、どーしても暗く汚くなってしまう。
安物のCCDではノイズが大きいため、暗い場合はノイズにまぎれてしまう。
最近ではより低消費電力の、CMOS版CCDなども出てきているようだが、これの性能はどれくらいなんだろうか。
ちなみに昔(20年近く前)、NHKの研究発表で、冷却システムで冷却することで性能を高めているCCDの紹介があった。
冷却システムを切ると、だんだんとぼやけていく。当時のハイビジョン用のものだったかもしれない。
ちなみに、そのときいっしょに紹介されていたシステムの画像メモリは2Gであった。
当時のマシンでは、VRAMを128KB積んでいれば大容量という時代である。
紹介しているコンパニオンのお姉さんはにこやかに言い放っていたのだが、当時で2Gとはすさまじいもんであるな。
なお、当時の広告をみると大容量xxKBとか、NOWAITとか、いまからみるとちょっと恥ずかしくなってしまうような
うたい文句が並んでいる。まるで、カラーテレビが普及しはじめた頃のTVに、目に付くところに堂々とカラーのマークが
つけてあるように。
※10
12cmくらいのファンであると2500回転くらいが普通のようだ。
高速なものでは3000回転ものもあるようだが、2500回転で既に電流が0.45Aなどとなっているところを見ると、
消費電力的にもこれくらいがいいのかもしれない。
ちなみに、6800回転の高速回転ファンは、4cm程度であるが、0.5A近い。
第8回 ファン回転数制御計の作成!
前回作成したファン回転数計は、ファンの回転数をはかるだけのものであった。
今回のファンの回転数を制御する機構を搭載して完成
(※1)
である。
ファンの回転数を制御するにはかける電圧を変化させればよい。電圧が低ければ回転数が
下がるからだが、電圧の低さにも限界がある。あまりに低いと回転が始まらない問題
(※2)
がある。
逆に電圧が高い場合は回転数が多くなるが、高回転に耐えられるように作られていない場合は、
非常にやかましくなる
(※3)
上に、発熱などでコイルが焼き切れる、制御回路が故障する原因にもなる
ので、おすすめできない。
よって、回転制御は通常状態を100%ととし、それから回転数を下げることを目的とするわけ
である。
そこで、電圧を制御するわけであるが、PICマイコンはデジタルプロセッサであるから、出力は
当然デジタルである。これをアナログの電圧に変更するには、D/Aコンバータ
(※4)
を必要とする
上に、当然ながらデジタル信号用に数ビット分の端子をさかなければいけない。
液晶表示、スイッチ入力、ファン回転数入力などの端子を考えると、回転制御用に回せる出力ピン
はそれほど多くとれないのである。
しかしながら、ここでPWM
(※5)
なる方法がある。要は、単位時間あたりの出力している時間を変える
ことによって、トータルでみた場合の出力を同じにしようと言うわけである。
簡単言えば、ファンの電圧を半分にすることによって出力を半分にする
(※6)
のと、たとえば2秒間の
うち、全力で1秒間回転し、次の1秒間は制止する
(※7)
と言った動作を行えば、全体としての送り出
す風量は同じになるわけである。
(※8)
というわけで、ファンの電源を入れたり切ったりすることで、ファンの回転を制御し、風量を調整する
事にする。
が、PICの出力は5Vであるので、12Vのファンにはそのまま接続できない。
そこで、出力で、トランジスタなどをONにしファンの回転を制御するのだが、トランジスタでは、ファン
の回転する大電流に耐えられないかもしれない。
こういった場合に便利なのが、電流制御用FETである。
FETは直接12Vを操作するので、PIC回路系の出力である5Vでは問題がある。そのため、トランジスタを第1段
にいれ、ここで12Vを出力し、その出力でFETを操作
(※9)
することにする。
というわけで、作成した回路がこれ。
下は宇宙英雄ローダンシリーズ
(※10)
こういった回路をいくつも作っていると、だんだんと配線の引き回しなどがなれてくるのか、コンパクトに
設計できるようになるものである。
ちなみに、右下に回転数を制御するスイッチ
(※11)
をつけた。これを押すたびに16段階に変化し、最後まで
いくと、最初にループ
(※12)
するようにしてある。
6840rpm とりあえず、フルパワー状態
6270rpm 1段階落としたところ
5760rpm 2段階目
3270rpm 回転数的に半分くらいの状態
360rpm もっとも落とした状態。360rpmというと98のFDDの回転数
(※13)
を思い出す
電源供給OFF状態
本当は回転数を指定して、その回転数に調整するなどもやりたかったのだが、計算や制御が面倒なのと
あまり意味がないと思われるので、今回のような構成になった。まぁ、これでも問題ないと思うが。
今回はこの辺で。
注
※1
と作っている間に、どこかのメーカーがすでに作っていたようだ。
ま、PICで制御した方が融通が利くのでよしとしよう。
※2
ブラシレスファンの場合、ファンのブレード側に永久磁石、台側にコイルがあり、このコイルに反発し
たり引き寄せ合ったりして回転させるのだが、電圧が低い場合、この力が弱くはねを引っ張れないこと
がある。いったん回転してしまえば、多少弱くても回転し続けるのだが。要は静止状態から回転状態に
移行する時には、回転を維持し続けるときよりも多くの力を必要とするためである。
※3
そのファンがどれくらいの速度で回せるかは、様々な要因で決まるといえる。
大きな要因としては、ブレードの設計とベアリング部分であろう。
ファンの回転している羽の部分であるが、この部分は風を起こす部分であるため、気流が渦を巻いたり
するのだが、これをなるべく起こさないような設計になっていることが望ましい。そのまま騒音などの
問題になるからである。余談であるが、潜水艦のスクリューなどがこの部分に一番気を使っていると思
われる。たしか四国あたりにある会社が一番のノウハウを持っているようだ。
ベアリング部分は軸受けに搭載されており、ファンをなめらかに回転させることを目的としている。
通常はボールベアリングで、2個程度の金属球が軸を支えている。この金属球は非常に高精度に表面を
研磨され、でこぼこは電子顕微鏡レベルで走査しないとわからないほどであるが、安いものはそこまで
磨かれていないため、軸周りががたついたりする。また、衝撃などで表面に微細な傷が付いても同様で
ある。最近では流体軸受けなどを採用したものも出回っているが、これは前回書いた。
摩擦がどのようにして発生するのかという原理が解明されれば、摩擦がない素材が開発できるかもしれ
ない。その素材が使えれば軸受けとしては理想的なのであるが。
※4
通常D/Aコンバータは原理上、変換したアナログ信号は階段状になる。階段の段差を小さくするには、
それだけビット数を増やせばいいのであるが、現在使用しているPICマイコンの端子数から言って、よ
り高価なものにしないと足りない。
そのうえ、階段状になっている部分には、出力切り替えに伴う高周波ノイズが乗ることもあり、ローパス
フィルタをつけないといけない。内蔵しているものもあるようだが、その型番が安く売っているかどうかは
不明である。
なお、このフィルタがいらないD/Aコンバータとして、フルエンシーD/Aコンバータなるものがあるよう
だが、最近とんと聞かない。
かつて、オーディオマニアの間なんかで結構有名になったみたいなのだが。
※5
パルス幅変調というやつである。
※6
もちろん、出力が電圧によってリニアに変化する場合を仮定するとして、である。
実際には、そんな変化を起こすのは、狭い範囲であろう。
※7
この場合も、電圧を0にした瞬間に停止するということを前提にしてある。
※8
PWMを使用したものといえば、液晶のバックライトを制御しているインバーターなんかもそうであるが、
その昔、BEEP音でサンプリング出力を行っているものなどがそうであった。
この場合は、BEEP音の音量を制御できないので、かわりにBEEP音の出力時間を調整することによって、出力
する空気の疎密波(要するに音の事)の出力を調整し、鼓膜を振動させる力を同じにするわけである。
音としてはかなりリアルに再現できるのであるが、BEEPでならす音が今ひとつであったのは、BEEPを直接
制御できるわけではなく、BEEPはなりっぱなしで、その出力を制御するゲートを操作するハードウェアで
あったためであろう。ゲートを開いたときに、ちょうど出力は谷間になっているかもしれないのだ。
※9
制御する単位時間が細かければ細かいほどなめらかになっていいのであるが、あんまり早く制御してもFET等
の応答時間の問題もあり、出力する波形がなまってしまう。
出力単位時間が短い場合は、このなまった部分が問題になる。
ちなみに、DCブラシレスファンは、制御回路がコイルを制御するので別に気にしなくてもよいのだが、
直接コイルを制御する場合、電源供給をやめると、回転している永久磁石の関係で、コイルに高圧の逆起
電力が発生するそうだ。そのため、逆方向にダイオードなどをいれて保護してやらないと、FETを破壊す
る問題がある。注意されたし。
※10
どーでもいいことだが、撮影時にちょうどあって使用(下にひいた)したのは273巻。
ローダンハンドブックを読むとだいたい300巻くらいまでのあらすじが書いてあるのだが、つまらなくなる
ので、その部分は読んでいない。
やたらと語尾に「シュ」のつく名前多し。
既にオリジナル(ドイツ語か)は1000以上出ているはず。(ペーパーバックで1話構成。日本語訳は2話)
大体50巻で一区切りつくので、250巻くらいから読んでみるといいかもしれない。
ちなみに、30年先の出版予定まで立っているとか。
※11
今回スイッチにしたのは、可変抵抗などのボリュームだとA/Dコンバータが必要になるからである。
もちろん、PICシリーズにはA/Dコンバータ内蔵のものもあるのだが、値段が2倍する&足の数が
多いソケットがない、ので今回は見送った。もっとも結局は内部で数段階に分けて制御するので、
大した違いはないのだが、スイッチでぽちぽちやるのと違って、ボリュームの可変具合にクイックに
応答がついてくるレスポンスの良さを兼ね備えているのだが…
※12
86風にいうとラップアラウンド。
※13
秒間6回転。1.25MBアクセス時の回転数である。
2DDなどの場合は300rpmであるから、秒間5回転である。
数字の上では大した違いはないように見えるが、実際に使ってみると、アクセス時の音が何となくもたついて、
もどかしいような印象を受けるくらい変わる。
98では、たしかFDDの2番ピンでこの動作を切り替えていた。
高速回転時でも、読み込み時は、VFOの追従範囲内であれば多少早くても問題ないのであるが、それでも限界は
20%程度であるので、ドライブのばらつきも考えるとおすすめできない。
また、書き込み時はドライブの速度に依存するので、300rpmで回した方がより高密度に書き込むことができる。
舶来マシンではこの速度で書き込むため、1.44が最初から書き込めたのであろう。
しかしながら、ドライブからのReady信号を読まない(一定時間待ってからアクセスしてごまかす)など、あち
こちで細かい手抜きが見える。彼らはFDDが嫌いだったのであろうか?
もっとも日本人的細やかさ&せっかちでないというのが真相なのかもしれないが。
改造講座メニューへ
トップへ

 実験中の様子
実験中の様子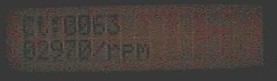
 下は宇宙英雄ローダンシリーズ(※10)
下は宇宙英雄ローダンシリーズ(※10) 6840rpm とりあえず、フルパワー状態
6840rpm とりあえず、フルパワー状態 6270rpm 1段階落としたところ
6270rpm 1段階落としたところ 5760rpm 2段階目
5760rpm 2段階目 3270rpm 回転数的に半分くらいの状態
3270rpm 回転数的に半分くらいの状態 360rpm もっとも落とした状態。360rpmというと98のFDDの回転数(※13)を思い出す
360rpm もっとも落とした状態。360rpmというと98のFDDの回転数(※13)を思い出す 電源供給OFF状態
電源供給OFF状態