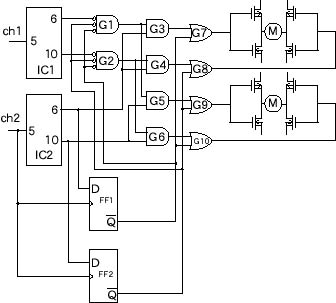
嵍偺恾偑崱夞惢嶌偟偨俀俠俫傾儞僾偺摦嶌尨棟傪愢柧偡傞夞楬恾偱偡丅俬俠侾偱慜屻傪僐儞僩儘乕儖偟丄俬俠俀偱嵍塃傪僐儞僩儘乕儖偟傑偡丅俬俠侾丄俀偺俇傑偨偼侾侽僺儞偵偼擖椡怣崋偵墳偠偰儘乕偺僷儖僗偑弌椡偝傟傑偡丅僯儏乕僩儔儖偱偼僴僀偺忬懺偱偡丅僗僥傿僢僋傪戝偒偔搢偣偽偦偺暘暆偺峀偄僷儖僗偑弌椡偝傟傑偡丅僎乕僩侾丄俀偼俁擖椡偺僱僈僥傿僽俙俶俢僎乕僩偱偡偐傜丄俀偮偺俢僼儕僢僾僼儘僢僾偺俻僶乕弌椡偑儘乕偱偁傟偽丄俬俠侾偺儘乕偺僷儖僗傪偦偺傑傑捠偟傑偡丅僎乕僩俁丄係丄俆丄俇偼俀偮偺儌乕僞乕偵俬俠侾偺怣崋傪暘攝偡傞摥偒偲丄俬俠俀偺嵍塃惂屼怣崋偱嵍塃僶儔儞僗傪惂屼偡傞摥偒傪偟傑偡丅僎乕僩俁丄係偼儌乕僞乕侾傪丄僎乕僩俆丄俇偼儌乕僞乕俀傪僐儞僩儘乕儖偟傑偡丅椺偊偽丄儌乕僞乕侾傪嵍偺儌乕僞乕偲偡傞偲丄俬俠俀偺俇僺儞偺僷儖僗暆偑戝偒偔側傞偲丄僎乕僩俁丄係偼僎乕僩侾偺僷儖僗傪捠偟偵偔偔側傝傑偡丅偟偨偑偭偰丄嵍儌乕僞乕偺夞揮懍搙偑掅壓偟丄嵍偵慁夞偟傑偡丅俬俠俀偺侾侽僺儞偺僷儖僗暆偑戝偒偔側傞偲丄僎乕僩俆丄俇偼僎乕僩俀偺僷儖僗傪捠偟偵偔偔側傝傑偡丅偟偨偑偭偰丄塃儌乕僞乕偺夞揮懍搙偑掅壓偟丄塃慁夞偟傑偡丅師偵丄俬俠俀偺俇偍傛傃侾侽僺儞偑僴僀偺帪乮僯儏乕僩儔儖帪乯偍傛傃丄僷儖僗忬懺偺帪偼丄俢僼儕僢僾僼儘僢僾偺俻僶乕弌椡偼儘乕偵側偭偰偄傑偡丅偟偐偟丄俇傑偨偼侾侽僺儞偑姰慡偵儘乕偵側傞偲乮偄偭傁偄偵搢偣偽捈棳偑弌椡偝傟傑偡丅乯俻僶乕弌椡偼僴僀偵斀揮偟傑偡丅偟偨偑偭偰丄俬俠侾偺弌椡偼僎乕僩侾傑偨偼俀偱偝偊偓傜傟傑偡丅堦曽丄俢僼儕僢僾僼儘僢僾侾偺俻僶乕弌椡偼僎乕僩俉丄俋偵愙懕偝傟丄嵍儌乕僞乕傪媡揮丄塃儌乕僞乕傪惓揮偝偣傑偡丅偟偨偑偭偰丄挻怣抧嵍慁夞偟傑偡丅俢僼儕僢僾僼儘僢僾俀偺俻僶乕弌椡偑僴僀偺帪偼丄挻怣抧塃慁夞偵側傞偺偼丄愢柧偡傞傑偱傕偁傝傑偣傫丅
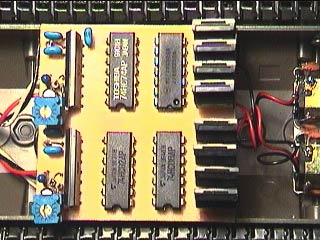
嵍偺幨恀偼崱夞惢嶌偟偨僾儕儞僩婎斅傪昞偐傜尒偨偲偙傠偱偡丅嵍偺嵶挿偄俬俠偼僒乕儃梡偱丄偦偺塃偺係屄偑僎乕僩側偳偱偡丅堦斣塃偼僪儔僀僽梡偺僷儚乕俵俷俽俥俤俿偱偡丅嵟戝掕奿俁侽俙側偺偱丄俆俙僋儔僗偺儌乕僞乕偵傕巊梡偱偒傑偡丅
丂
丂
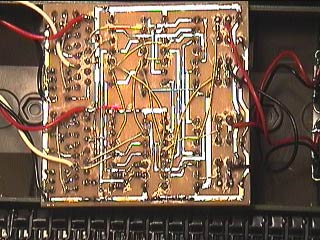
嵍偺幨恀偼崱夞惢嶌偟偨僾儕儞僩婎斅傪棤偐傜尒偨偲偙傠偱偡丅曅柺婎斅傪巊梡偟偨偨傔丄僕儍儞僷乕慄偑懡悢昁梫偵側偭偰偟傑偄傑偟偨丅

偛拲堄偔偩偝偄丅僼傽僀儖僒僀僘偑1.4俵傕偁傝傑偡丅
嵍偺幨恀傪僋儕僢僋偡傞偲幚嵺偵摦嶌偟偰偄傞偲偙傠傪儉乕價乕偱偛棗偵側傟傑偡丅