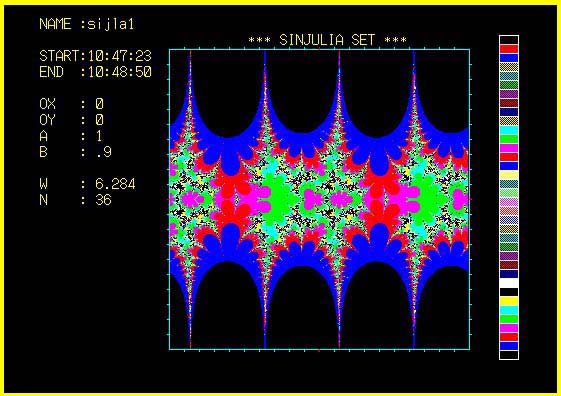
超越函数 Z= ( A + Bj ) * sin( X + Yj )
Julia type dynamical system
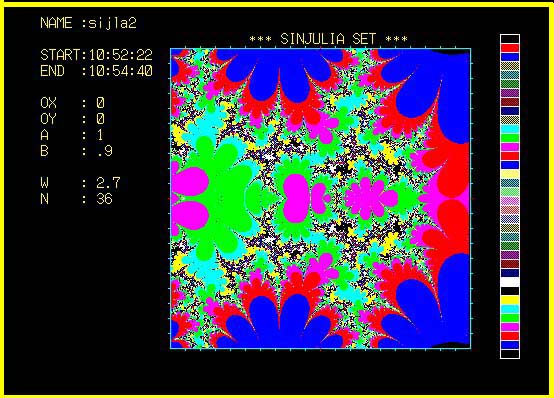
 超越函数 Z= ( A +
Bj ) * sin( X + Yj )
Julia type dynamical
system
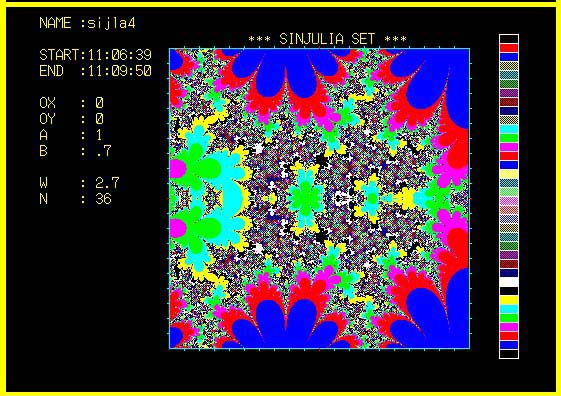
超越函数 Z= ( A +
Bj ) * sin( X + Yj )
Julia type dynamical
system