前回の回路では、2つの欠陥がありました。
(1)超信地旋回が必ず最高速度になってしまう。
(2)前進時の超信地旋回は問題ないが、後退時のそれの方向が逆である。
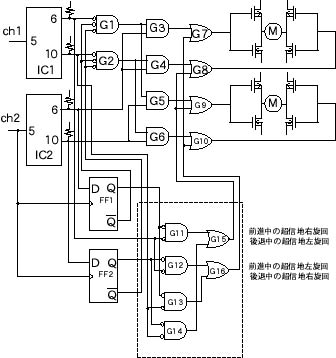
左の図は、これらを改善した回路図です。破線で囲った部分を追加しています。説明の都合で、上側のモーターを右モーター、下のモーターを左モーターとします。また、G7側がONになったときを右モーターの正転、G8がONになったときを逆転とします。同様にG9がONで正転、G10がONで逆転とします。G1~G10までは以前の回路とまったく同一です。(1)を改善するために、超信地旋回の時も、IC1の6または10の信号を使うようにします。この信号を左右のモーターに割り振ります。超信地旋回とはその地点で右または左に急旋回することです。車だとスピンに相当する動作ですが、戦車では、左右のキャタピラをお互いに逆回転させて行います。右にスティックをいっぱいに倒すと、FF1のQはローになります。前進中はIC1の6からローのパルスが出力されています。G11はこれらの両条件がそろうと信号を通過させますから、G15を通して、G8,G9をONにします。したがって右モーターが逆転、左モーターが正転し、超信地右旋回します。しかも、IC1の6のパルス幅に比例して速度もコントロールされます。左にスティックをいっぱいに倒すと、FF2のQはローになります。前進中はIC1の6からローのパルスが出力されています。G12はこれらの両条件がそろうと信号を通過させますから、G16を通して、G7,G10をONにします。したがって右モーターが正転、左モーターが逆転し、超信地左旋回します。後退中はIC1の10からローのパルスが出力されています。これを右はFF1のQ、左はFF2のQとネガティブアンドをとって、(G13,G14)左右のモーターをコントロールします。前進中と後退中では、右と左の関係が逆になるので、G15,G16のORでうまく整合させています。
さて、これで原理的には問題解決は可能なのですが、この回路をそのまま作ると、以前より部品の数が増加してしまいます。もちろん、ゲートアレーを使えば、全体でワンチップも可能な規模なのですが、一般的な(古典的かも知れません。)個別ICを組み合わせると、どうしても、6個のICが必要です。そこで、個別ICで個数を減らす方法をいろいろ検討した結果、回路の考え方を根本から変更して、データセレクタを使うことにしました。この方式にすれば、前回と同等の基板に収まる回路を構成することが出来そうです。
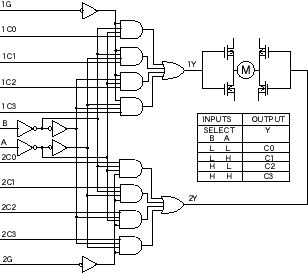
データセレクタとは、左の図のように、セレクト入力A,Bの組み合わせによって、出力YにC0~C3のいずれか1つを選択することが出来る便利なICです。超信地旋回のために右または左の信号がFF1,2のQバーにハイとなって出力されますから、これをA,Bに接続すれば、出力Yから取り出す信号を左右コントロール信号で選択することが出来ます。しかも、このIC1個で1個のモーターを制御できるため、全体の部品個数を減らすのにも役立ちます。
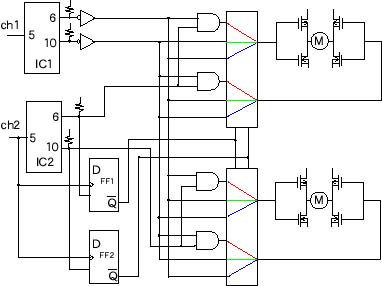
CH2が例えばニュートラルの場合、データセレクタは赤の線で示す回路に接続しますから、前進、後退、あるいは緩旋回となります。CH2を右にいっぱい倒すと、FF1のQバーが1となり、データセレクタは緑の線で示す回路に接続します。したがって、前進または後退の時に、超信地右旋回します。停止の時には何も起こりません。CH2を左にいっぱい倒すと、FF2のQバーが1となり、データセレクタは青の線で示す回路に接続します。したがって、前進または後退の時に、超信地左旋回します。